| img | ||
| satnogs-client | ||
| scripts | ||
| .gitignore | ||
| greenctld | ||
| LICENSE | ||
| LICENSE-CC | ||
| LICENSE-upstream | ||
| README-upstream.md | ||
| README.md | ||
| requirements.txt | ||
greenctld
Controller software for Green Heron RT-21 Az/El.
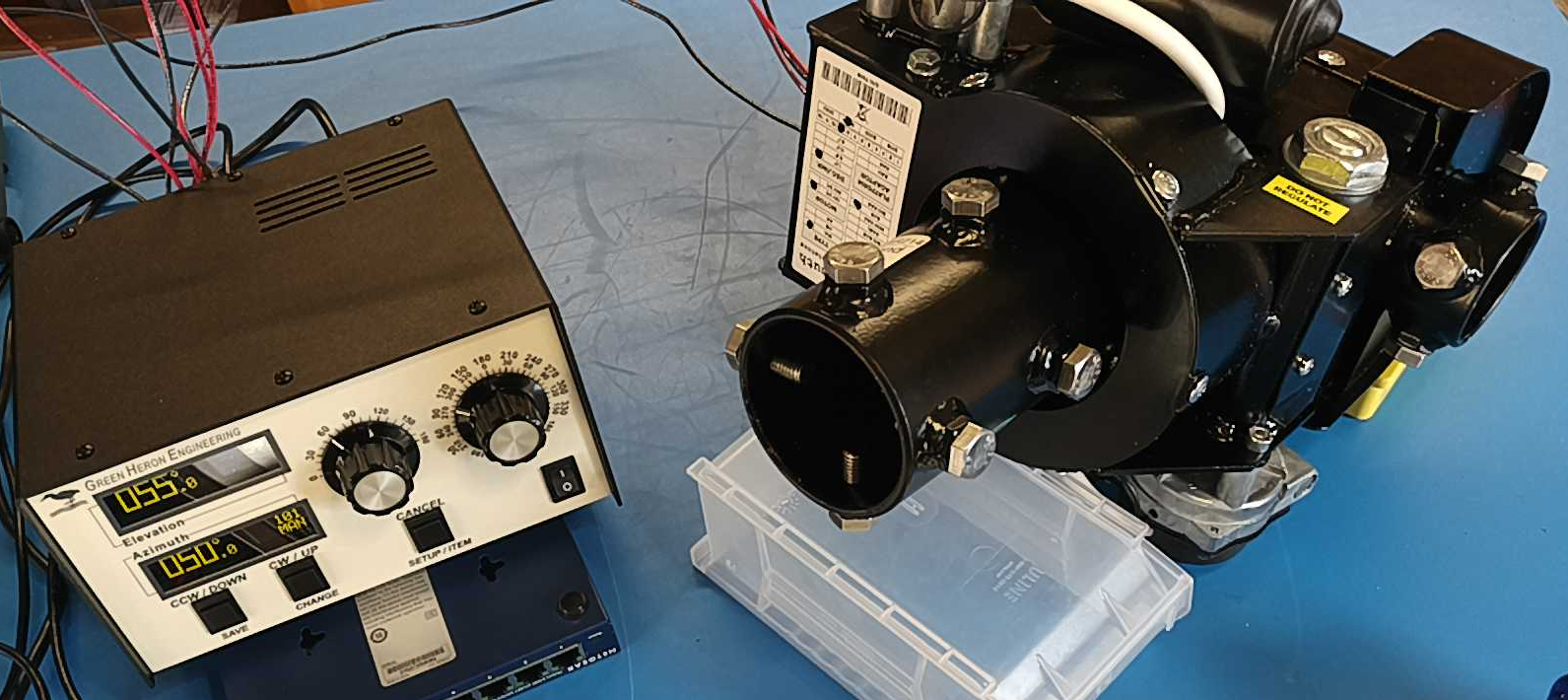 Green Heron RT-21 controller with Alfa SPID RAS
Green Heron RT-21 controller with Alfa SPID RAS
Install
Install thusly:
sudo apt install python3-virtualenv python3-pip
git clone https://spacecruft.org/spacecruft/greenctld
cd greenctld
virtualenv -p python3 env
source env/bin/activate
pip install --upgrade pip
pip install -r requirements.txt
SatNOGS-client
HOWTO connect to the Libre Space Foundation's SatNOGS network? Not sure.
The Green Heron RT-21 driver that has been in Hamlib for a decade
only supports one USB port. Th Green Heron RT-21 Az/El has one
USB port for azimuth and one USB port for elevation. This makes
the Hamlib driver that has been in Hamlib for 10+ years unsuitable
for use with an Az/El antenna setup. In sum, the hardware isn't
plug & play with satnogs-client.
There is a driver under a libre license available upstream here:
The greenctld in that repo was written for Python 2.
The present spacecruft repo ports it to Python 3.
This is mostly done.
The greenctld daemon listens on port 4533 similar
to rotctld. It is unclear to me how to get the
satnogs-client to use this port instead of wanting
to start it's own rotctld.
In July of 2021, a commit was made to the main Hamlib
repo that added dual USB control for the Green Heron
RT-21 Az/El. This commit is not in the Hamlib version
that is in the latest satnogs-client release, however.
The new version adds a second controller command line
option:
-r, --rot-file=DEVICE set device of the rotator to operate on
-R, --rot-file2=DEVICE set device of the 2nd rotator controller to operate on
One option would be to adapt satnogs-client to use this new version.
Another option would be to port these patches back to the version
satnogs-client is running.
SatNOGS Connection Options
Which option to use to connect the Green Heron RT-21 to satnogs-client?
Possibilities:
- Configure
satnogs-clientto usegreenctldinstead ofrotctld. - Patch
satnogs-clientto use recent Hamlib (no changes to Hamlib). - Patch Hamlib with backported dual USB patches (no changes to
satnogs-client). - Other.
Upstream
Upstream Python 2 version.
Copyright (c) 2017, Astro Digital, Inc.
License / Copyright
Port from Python 2 to Python 3 of mct's greenctld.
Same as upstream, permissive license, see LICENSE.
Documentation License: CC By SA 4.0 International.
Source:
Copyright (C) 2022 Jeff Moe.